服務熱線:
021-54321756
當機器人的運動(例(lì)如由於有限的臂長)無法達到某些個別的測量位置時,可安裝混合測量工位。有時使用靜態的固定傳感器來檢測難(nán)以達(dá)到的個別測量點,會比另外安裝一個測量機器人更為經濟。可控製固定傳感器,使其與機器人同步進行測量。在周期時間具有關鍵性的應用情況下,這也使得測量點的(de)數量增加成為可能。甚至由於工件的幾何形狀或由於工(gōng)件夾具的設計(jì)而無法保證可以達到個別的測量點時,固定傳感器也有助於解決測(cè)量點的(de)可達性問
谘(zī)詢熱線:021-54321756
當機器人的運動(例如由於有限的臂長)無法達到某些個別的測量位置時,可安裝混(hún)合測量工(gōng)位。有時使用靜態的固定傳感器來檢測難以達到的個別測量點,會比另外安裝一個測(cè)量機器人(rén)更為經(jīng)濟(jì)。
可控製固定傳感器,使其與機器人同步進行(háng)測量。在周期時間具有關鍵性的(de)應用情況下,這也使(shǐ)得測量點的數量增加成(chéng)為可能。
甚至由於工件的幾何形狀(zhuàng)或由於工件(jiàn)夾具的設計而無法保(bǎo)證可(kě)以達到個(gè)別的測量點時,固定傳感器也有助於解決測量點的可達性問題。
此外,可用固定傳感器來(lái)測定實際(jì)的工(gōng)件位置,並於某些情況(kuàng)下(例如工件(jiàn)的夾具無法充分(fèn)再現時)可用 3-2-1 的坐標係校準來予以補償。
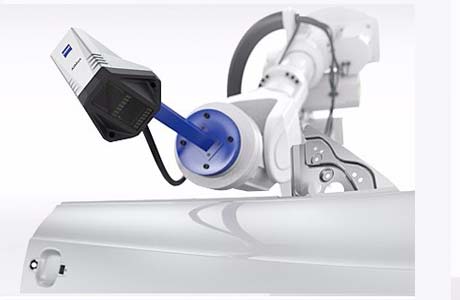
混合式測(cè)量工位
固定傳感器與(yǔ)機器人傳感器混合使用
上一篇:離線機器(qì)人工位
下一篇:在線測量機器人